Achieving stable levitation in a Hyperloop vehicle requires precise control of fifteen interconnected parameters, a challenge that traditional trial-and-error tuning methods could not efficiently solve.
Delft Hyperloop X saw an opportunity to use Simcenter Amesim to calculate these parameters automatically and accelerate the development process. However, unlocking the full potential of the simulation software required additional expertise and experience.
To navigate the complexity of the software and overcome several technical challenges, the team partnered with Femto Engineering.
When Delft Hyperloop X began using Simcenter Amesim, it was already quite late in the academic year: not until mid-April. As with many advanced engineering tools, the software’s full potential and range of applications become clearer as users gain hands-on experience.
Simcenter Amesim is a simulation software package that operates across multiple domains, including physics, mechanics, electronics, and control systems. Instead of detailed designs, it works with component models defined by parameters.
This makes it valuable for early design, system validation, and understanding interactions between complex subsystems.
For Delft Hyperloop X, Simcenter Amesim offered the possibility to simulate the levitation system and calculate the optimal control parameters required for stable operation.

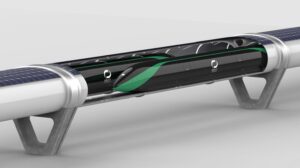
Photo 1. Simcenter Amesim is a fully integrated, scalable system simulation platform for modelling and analyzing multi-domain systems.
The Hyperloop is a levitating vehicle that, even when stationary, has five degrees of freedom that must be precisely controlled. A PID controller is used for each degree of freedom, and each controller has three gains (P, I, and D).
This results in fifteen adjustable parameters that all need to be tuned correctly to achieve stable levitation.
In Simcenter Amesim, the vehicle can be modelled as a simple cube with mass, moment of inertia, wheel stiffness, and magnetic forces. This can be done in 1D, 2D, or 3D, with each dimension allowing more to be predicted.
The control system, including the PID controllers, can also be recreated within the software. Using the built-in optimisation function, the most stable controller gains can then be calculated automatically.
Previously, these parameters were tuned manually through trial and error. With simulation, design changes such as a different vehicle mass can be evaluated much faster. Simply adjust the mass in Simcenter Amesim, run the simulation, and the new optimal gains become available.
To achieve reliable results, however, all system parameters first needed to be identified accurately. The magnetic force proved particularly challenging. Several methods failed to determine the actual force, and the team eventually hit a wall.
To overcome these challenges, Delft Hyperloop X worked closely with Femto Engineering and Project Engineer Jordi Brouwer. Together, the teams investigated how to further improve the optimization workflow and achieve more reliable results for this specific application.
Untangling a non-linear force that depends on multiple variables is no simple task. As is often the case with advanced engineering software, the team needed to explore several implementation details and configuration settings to successfully apply the workflow to their use case.
Some aspects of the integration required additional investigation and testing before the desired workflow could be achieved. By working through these challenges together, the team was able to establish a robust workflow and continue development.
With Jordi’s support and examples, the team ultimately developed a working API (Application Programming Interface) that allows Simcenter Amesim simulations to run externally and supports a tailored optimization workflow for their specific application.
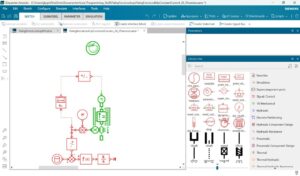
Photo 2. The control system, including the PID controllers, can also be recreated within the software.
The project has now reached an important milestone. With the support of Femto Engineering, Delft Hyperloop X successfully developed a working API that can run Simcenter Amesim externally and apply an optimisation method beyond the software’s standard capabilities.
While the force table and test data still need to be integrated, the technical barrier that had previously held the team back has been overcome.
The automation possibilities that follow are significant. Once the force table is available, the optimal gains for the levitation system can be calculated automatically, including for future design changes.
Without the help of Femto, the team would certainly not have reached this point. Setting up an API was not something the team had any prior experience with, but Jordi Brouwer guided them smoothly through the first stages of this part of the process.
Source: Delft Hyperloop
Do you need more information or want to discuss your project? Reach out to us anytime and we’ll happily answer your questions.
At Femto Engineering we help companies achieve their innovation ambitions with engineering consultancy, software, and R&D.
We are Siemens DISW Expert Partner for Simcenter Femap, Simcenter 3D, Simcenter Amesim, Simcenter STAR-CCM+, SDC verifier, Altair HyperWorks, Altair SimSolid and Altair PhysicsAI. Get in touch and let us make CAE work for you.
Sign up for our newsletter to get free resources, news and updates monthly in your inbox. Share in our expertise!